Design and Analysis of a Spherical Joint Mechanism for Robotic Manipulators
Por um escritor misterioso
Last updated 30 maio 2024

Design and Analysis of a Spatial 3-DOF Parallel Manipulator with 2T1R-Type - Yanbin Zhang, Kwun-Lon Ting, 2013

A 3-RRR Spherical Parallel Manipulator Reconfigured with Four-bar Linkages
Revolute Joint: Most Up-to-Date Encyclopedia, News & Reviews

Parallel manipulator - Wikipedia
Frontiers Optimizing the Rigid or Compliant Behavior of a Novel Parallel-Actuated Architecture for Exoskeleton Robot Applications
Robotics, Free Full-Text
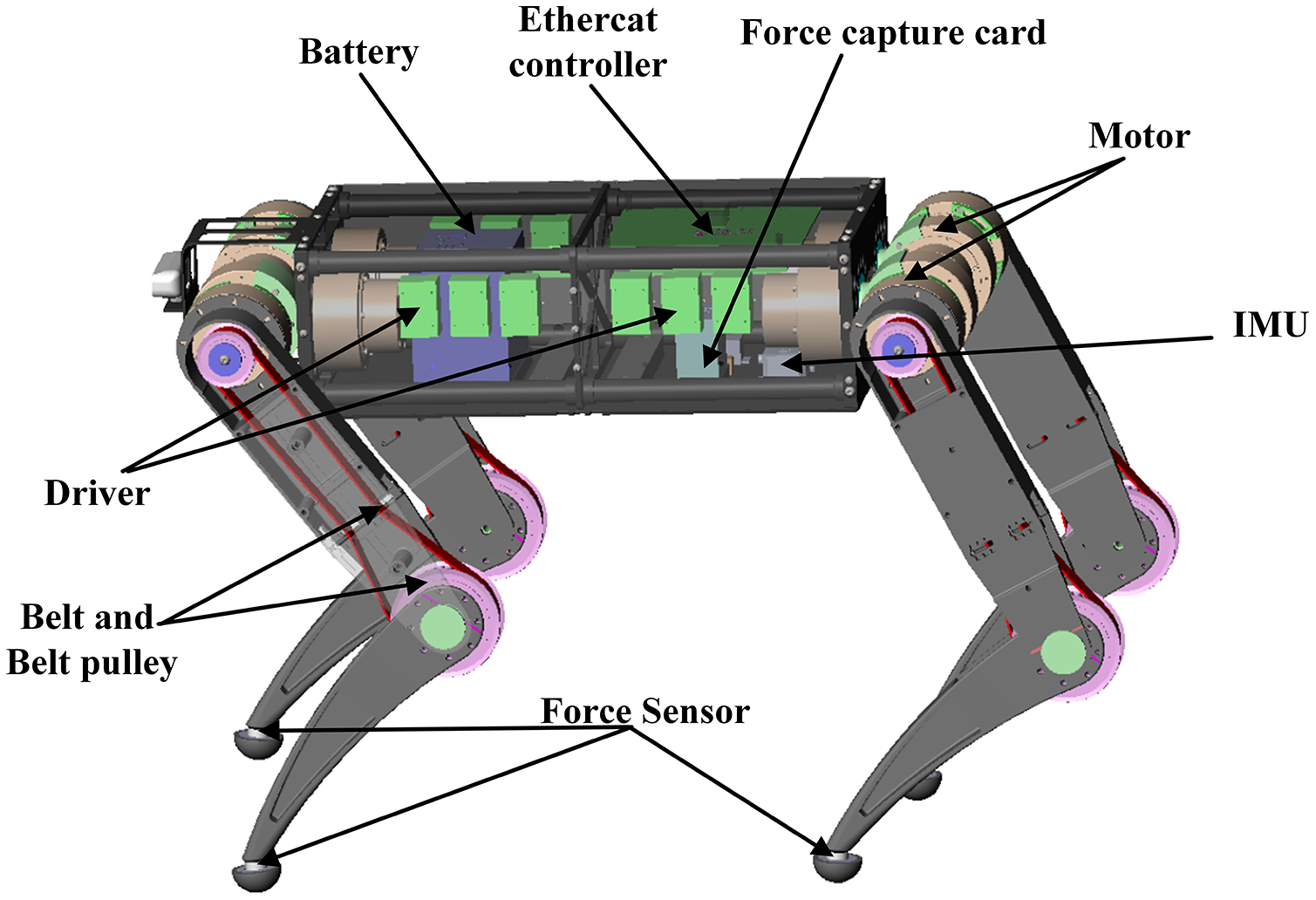
Whole-body kinematic and dynamic modeling for quadruped robot under different gaits and mechanism topologies [PeerJ]

Design and kinematic analysis of a 3-RRR spherical parallel manipulator reconfigured with four–bar linkages - ScienceDirect

Full article: Design and analysis of an active 2-DOF lockable joint
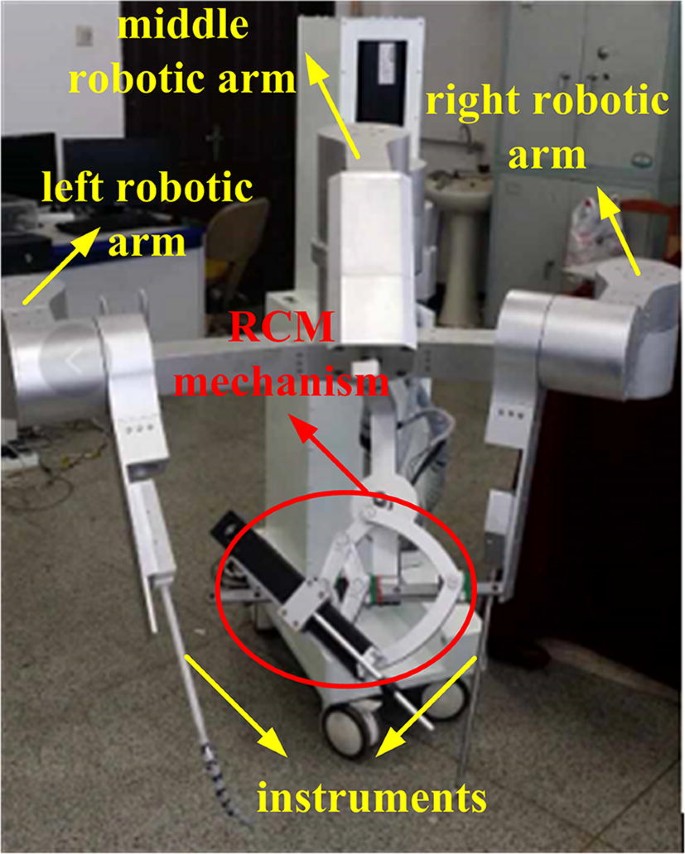
New remote centre of motion mechanism for robot-assisted minimally invasive surgery, BioMedical Engineering OnLine

Proposal of paper format for IFToMM World Congress
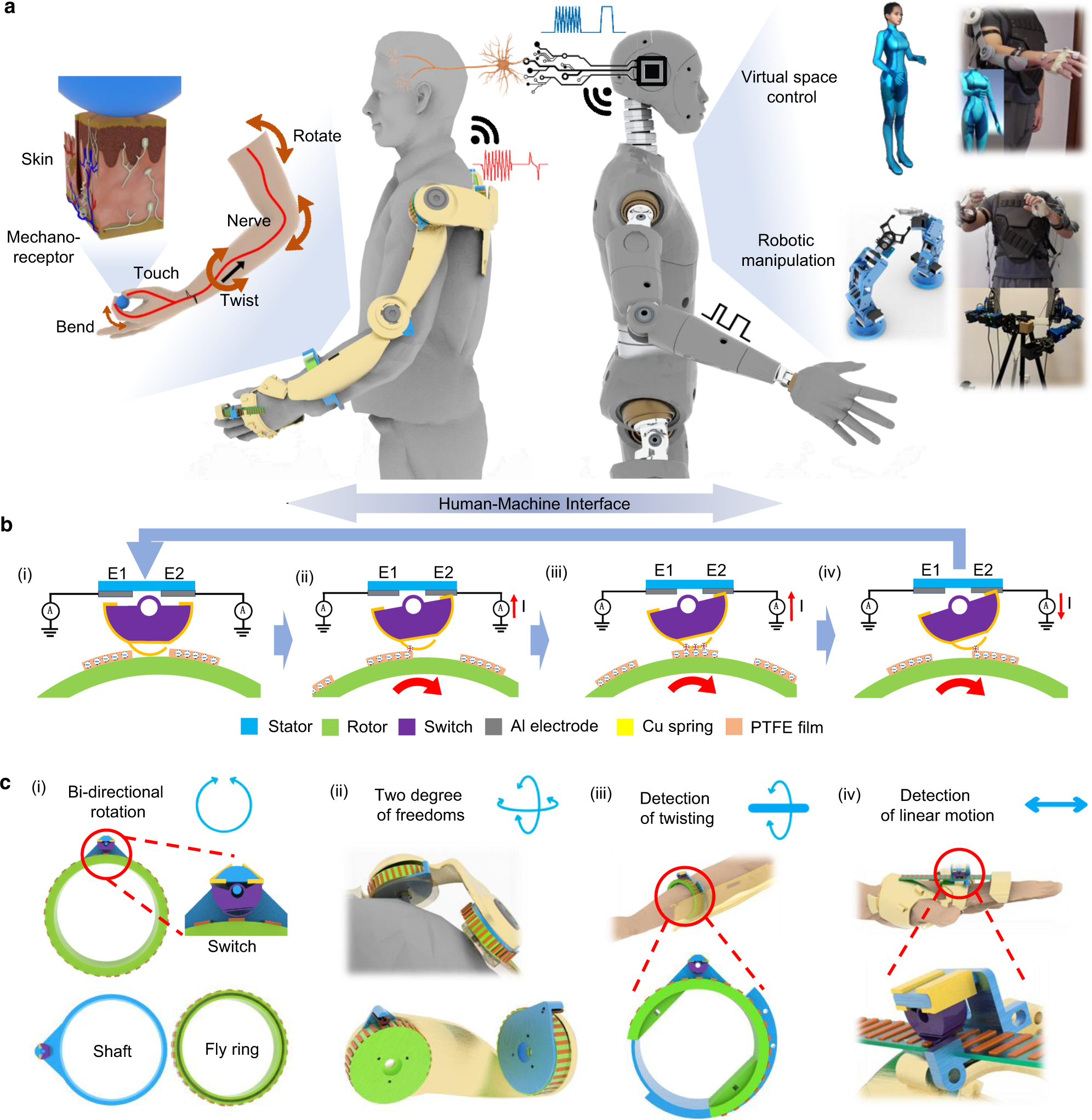
Low cost exoskeleton manipulator using bidirectional triboelectric sensors enhanced multiple degree of freedom sensory system
Recomendado para você
-
 Mechanical Properties Bending Strength (N/mm 2 )30 maio 2024
Mechanical Properties Bending Strength (N/mm 2 )30 maio 2024 -
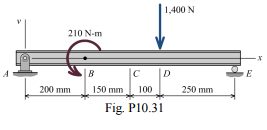 Solved) - For the beam and loading shown, use discontinuity functions to (2 Answers)30 maio 2024
Solved) - For the beam and loading shown, use discontinuity functions to (2 Answers)30 maio 2024 -
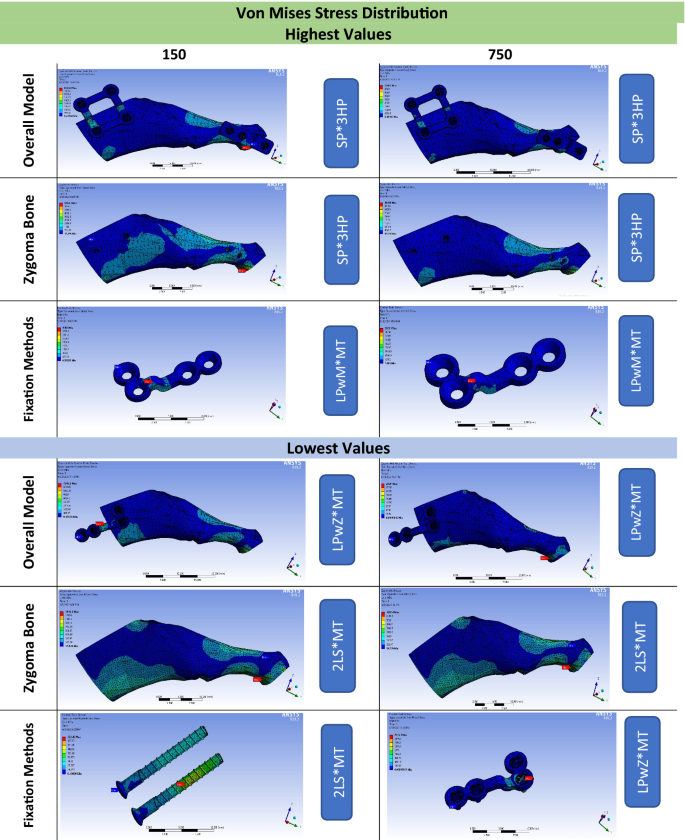 Stability of different fixation methods after reduction malarplasty under average and maximum masticatory forces: a finite element analysis, BioMedical Engineering OnLine30 maio 2024
Stability of different fixation methods after reduction malarplasty under average and maximum masticatory forces: a finite element analysis, BioMedical Engineering OnLine30 maio 2024 -
 Virtual Labs30 maio 2024
Virtual Labs30 maio 2024 -
 7.0mm 1670 N/mm2 Spiral PC Wire - China Steel Wire, PC Wire30 maio 2024
7.0mm 1670 N/mm2 Spiral PC Wire - China Steel Wire, PC Wire30 maio 2024 -
2019 SolidWorks - Assessing Stress Hot Spots30 maio 2024
-
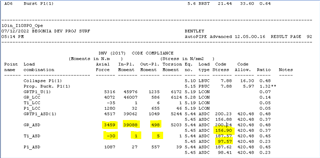 Autopipe Code Stress for DNVGL-ST-F101:2017 - AutoPIPE Forum - AutoPIPE - Bentley Communities30 maio 2024
Autopipe Code Stress for DNVGL-ST-F101:2017 - AutoPIPE Forum - AutoPIPE - Bentley Communities30 maio 2024 -
 Average Values of Withdrawal Strength (N/mm 2 )30 maio 2024
Average Values of Withdrawal Strength (N/mm 2 )30 maio 2024 -
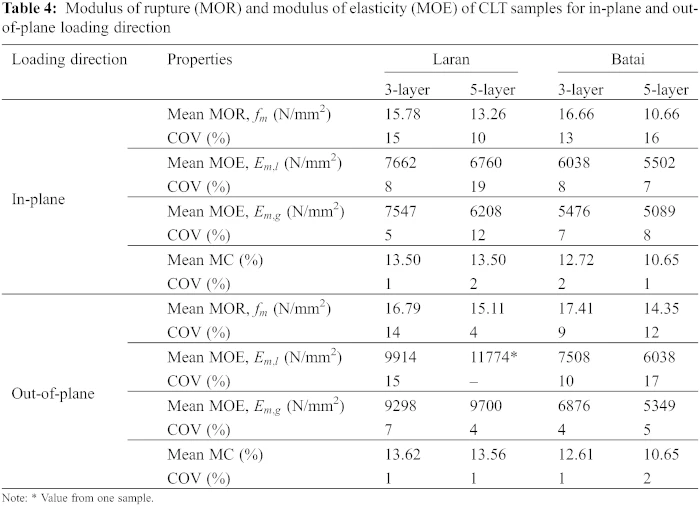 Bending, Compression and Bonding Performance of Cross-Laminated Timber (CLT) Made from Malaysian Fast-Growing Timbers30 maio 2024
Bending, Compression and Bonding Performance of Cross-Laminated Timber (CLT) Made from Malaysian Fast-Growing Timbers30 maio 2024 -
 SOLVED: Q4: Direct stresses of 160 N/mm2 tensile and 120 N/mm2 compressive exist on two perpendicular planes at a certain point in a body. They are also accompanied by shear stresses on30 maio 2024
SOLVED: Q4: Direct stresses of 160 N/mm2 tensile and 120 N/mm2 compressive exist on two perpendicular planes at a certain point in a body. They are also accompanied by shear stresses on30 maio 2024
você pode gostar
-
 The Persona Art Style30 maio 2024
The Persona Art Style30 maio 2024 -
Crunchyroll.pt - Proteja o seu mundo, Naofumi30 maio 2024
-
 Eat Sleep Anime Repeat Hoodie, Anime Hoodie NZ30 maio 2024
Eat Sleep Anime Repeat Hoodie, Anime Hoodie NZ30 maio 2024 -
 FUTZone - EA SPORTS FC News 🔺 on X: Exclusive🚨 EA Sports FIFA 23 officially launches worldwide on Friday, September 30 and releases on PlayStation 5, PlayStation 4, Xbox Series X/S, Xbox30 maio 2024
FUTZone - EA SPORTS FC News 🔺 on X: Exclusive🚨 EA Sports FIFA 23 officially launches worldwide on Friday, September 30 and releases on PlayStation 5, PlayStation 4, Xbox Series X/S, Xbox30 maio 2024 -
 Apelando para as armas pesadas! Battle Game in 5 Seconds (Dublado)30 maio 2024
Apelando para as armas pesadas! Battle Game in 5 Seconds (Dublado)30 maio 2024 -
Letras.mus.br - John Lennon 💬30 maio 2024
-
 The Seven 7 Heavenly Virtues Complete Anime Collection Anime Blu-ray 81672602162130 maio 2024
The Seven 7 Heavenly Virtues Complete Anime Collection Anime Blu-ray 81672602162130 maio 2024 -
 Genshin Impact Online Multiplayer / Coop - How To Unlock & Join - GameWith30 maio 2024
Genshin Impact Online Multiplayer / Coop - How To Unlock & Join - GameWith30 maio 2024 -
 MY FIRST 6 STAR!!! EXTREME Noob To Pro Day 3 - All Star Tower Defense30 maio 2024
MY FIRST 6 STAR!!! EXTREME Noob To Pro Day 3 - All Star Tower Defense30 maio 2024 -
Biggie Cheese needs to drop an album #shaggy #mrboombastic #mrbombasti, mr bombastic30 maio 2024


